「论文解读」Self-Supervised Person Detection in 2D Range Data using a Calibrated Camera
论文发表时间:2020年12月
论文地址:https://arxiv.org/abs/2012.08890
官方代码:https://github.com/VisualComputingInstitute/2D_lidar_person_detection
1 概述
为了解决单线激光行人检测缺乏数据集,引入相机,将图像中的检测结果映射到单线激光上,生成伪标签来做训练;
2 主要工作
第一步: 生成伪标签
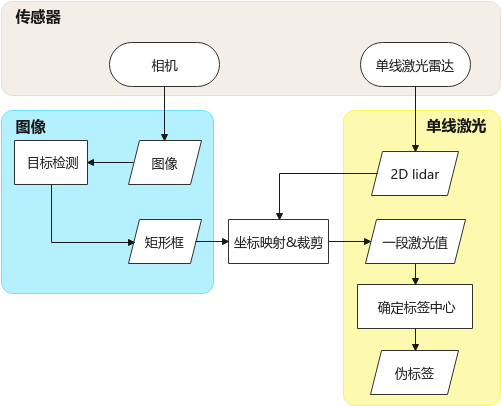
图1:生成伪标签
第二步:提出新的训练策略
3 细节
3.1 概念
图像标签:矩形框;
lidar 标签:滑窗(中心点 + 半径);
partially Huberized cross-entropy loss:1
\(\begin{align}
l =& \begin{cases}
-\tau \cdot p + \log(\tau) + 1, & if \ p \leq {1 \over \tau} \\
-\log(p), & else,
\end{cases} \tag{1.1}
\end{align}\)
mixup regularization:2
\(\begin{align}
\hat x =& \lambda x_i + (1-\lambda)x_j \\
\hat y =& \lambda y_i + (1-\lambda)y_j \tag{1.2}
\end{align}\)
3.2 基本操作
确定中心点 :
- lidar 点裁剪
- 根据外参,将图片检测结果的坐标映射到 lidar 坐标系,直接裁剪;
- lidar 中行人位置的确定
- k-means 聚类,聚出前景和背景两类;
- 取前景的中心为初始中心点;
- 用 0.5m 半径的均值漂移修正中心点;得到最终的位置;
当然,此处还对 box 做了一次筛选:
- 得分小于 0.75 不要;
- box 宽高比大于 0.45 不要;
- 和其他框重合度超过 0.4 不要;
确定标签 :
在训练阶段,0.4m 内作为分类的正样本;0.8m 内作为边界回归的正样本;为什么要这么复杂
4 实验
4.1 数据集
JRDB3
包括 3D 激光(3D 行人标注),图像(2D 行人标注),两个 2D lidar;
我们把 3D 标注结果转换到 2D lidar 上,用来做测试集;
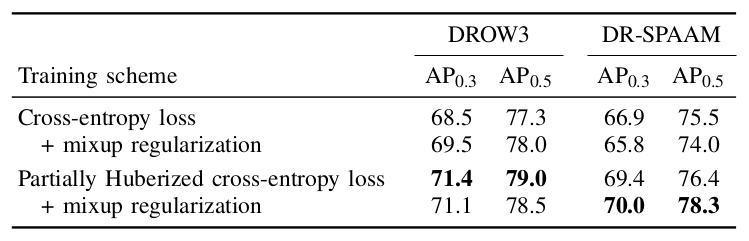
4.2 实验结果
5 总结
5.1 本文存在的问题
生成标签失效的情况::
| 原因 | 示例1 | 示例2 |
|---|---|---|
| heavy occlusion | 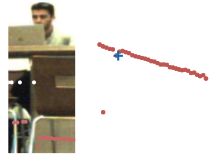 |
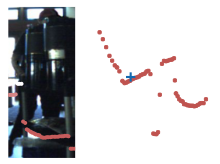 |
| background distraction | 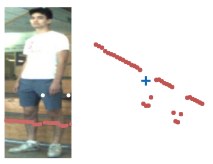 |
 |
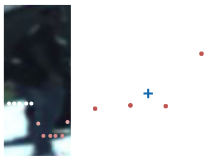
| sparse LiDAR points at far distance | 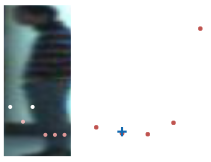 |
 |
| faulty calibration or synchronization between sensors | 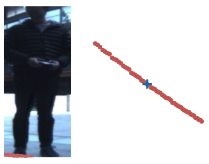 |
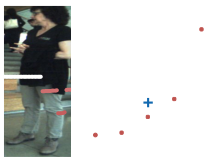 |
注:图片左边是相机中检测的人,右边的 + 是生成的激光伪标签(裁剪所得激光点,从中心向外扩展 0.5m);
5.2 疑问
1 必须全部自己采集吗,能否复用开源数据集;
需要图片和 lidar 同时采集才可以;也就意味着开源图片数据集无法复用;或许可以考虑 KITTI 等数据集;
2 图像检测框只有左右,那么前后是怎么裁剪的;
前后没有裁剪,只裁减了左右;当然,论文中过滤掉了检测框中心位置以上的 lidar 点;
3 具体裁剪的流程是什么,怎么映射的;
5.3 难点
- 针对标签失效的几个问题均无法处理;
- 落地过程中数据采集流程复杂;
- 2D lidar 检测效果待定;
5.4 展望
附录
A 推荐资料
损失函数
- A Detailed Guide to 7 Loss Functions for Machine Learning Algorithms with Python Code download Share
- Machine Learning Glossary
参考文献
-
A. K. Menon, A. S. Rawat, S. J. Reddi, and S. Kumar, “Can gradient clipping mitigate label noise?,” in International ↩
-
Conference on Learning Representations, 2020. H. Zhang, M. Cisse, Y. N. Dauphin, and D. Lopez-Paz, “mixup: Beyond Empirical Risk Minimization,” in International Conference on Learning Representations, 2018. ↩
-
R. Martı́n-Martı́n, H. Rezatofighi, A. Shenoi, M. Patel, J. Gwak, N. Dass, A. Federman, P. Goebel, and S. Savarese, “JRDB: A Dataset and Benchmark for Visual Perception for Navigation in Human Environments,” arXiv:1910.11792, 2019. ↩
-
L. Beyer, A. Hermans, and B. Leibe, “DROW: Real-Time Deep Learning based Wheelchair Detection in 2D Range Data,” IEEE Robotics and Automation Letters (RA-L), vol. 2, no. 2, pp. 585–592, 2016. ↩ ↩2
-
D. Jia, A. Hermans, and B. Leibe, “DR-SPAAM: A Spatial-Attention and Auto-regressive Model for Person Detection in 2D Range Data,” arXiv:2004.14079, 2020. ↩ ↩2
-
A. Ghosh, H. Kumar, and P. S. Sastry, “Robust Loss Functions under Label Noise for Deep Neural Networks,” in Conference on Artificial Intelligence, 2017. ↩
-
Y. Wang, X. Ma, Z. Chen, Y. Luo, J. Yi, and J. Bailey, “Symmetric cross entropy for robust learning with noisy labels,” in International Conference on Computer Vision, 2019. ↩
Comments