「论文解读」Faster R-CNN Features for Instance Search
https://blog.csdn.net/dengbingfeng/article/details/51453851 https://zhuanlan.zhihu.com/p/33625603
DeepVision Workshop in CVPR 2016
论文发表时间:2016年4月
论文地址:http://arxiv.org/abs/1604.08893
主页: http://imatge-upc.github.io/retrieval-2016-deepvision/
官方代码:https://github.com/imatge-upc/retrieval-2016-deepvision
一、概述
第一句:之前的图像检索方法,是以图搜图(整张图片匹配);本文是以图中物体搜图中物体(匹配的是图片中的目标物体,搜索与待搜索的数据都是包含目标物体的大图);
第二句:本文在以前的图像检索方法的基础上又加了重排序(二次排序),重排序是基于图像内部的区域(目标物体)做的;
图片中目标物体的来源是 Faster RCNN 的检测结果;
二、基本流程
前导知识:CNN,深度学习基本知识,图像检索的基本知识,Faster-RCNN;
第一步 Filtering Stage:在现有的 Faster-RCNN 模型上应用 IPA 策略提取特征,结合余弦相似度,对整个数据集图像进行第一次 rank——和待检索图片越相似越排名越靠前;
第二步 Spatial Reranking:在第一步的基础上,针对排名 top N 的图片,在现有的 Faster-RCNN 模型上应用 RPA 策略取得特征,比较余弦相似度,依然是越相似的排名越靠前,完成 rerank——即第二次排序;(此处 N 怎么选)
第三步:操作完后将 top 10 的结果显示出来;
三、细节
1. 概念
IPA :Image-wise pooling of activations
用最后一层卷积层的激活值(即特征图)来构建整幅图片检索所需的特征;
构造过程:取 Faster RCNN 的最后一层卷积层的输出(特征图)(conv5-3),每个特征图进行池化,池化成一个值,最后将所有的池化结果连在一起,就是最后用于检索的特征;该特征的维度与最后一层卷积层的个数相等;
RPA:Region-wise pooling of activations
用 Roi Pooling 层的激活值(即特征图)来构建其对应区域检索所需的特征;
构造过程:针对目标物体(的边框),在 RoI Pooling 层取得其特征图,每个特征图的池化结果组合起来就得到区域层面的检索特征;
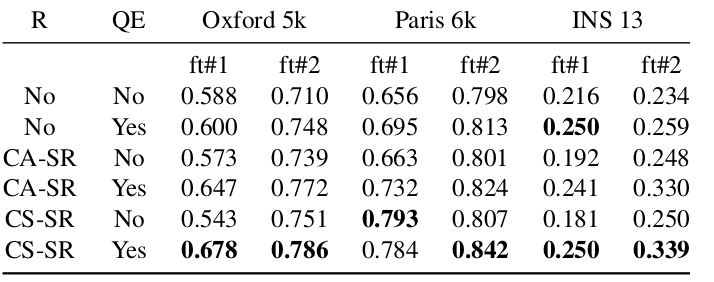
CA-SR:Class-Agnostic Spatial Reranking
未知类别空间排序:针对 RPA 取得的检索特征,用余弦相相似度来进行重排序;
CS-SR:Class-Specific Spatial Reranking
特定类别排序:针对 RPA 取得的检索特征,直接用该区域的分类得分(置信度)来进行重排序;
前提:该 Faster-RCNN 网络针对待检索物体进行过微调;
CA-SR 和 CS-SR 的区别就在于,用来重排序的指标不同;
2. 基本操作
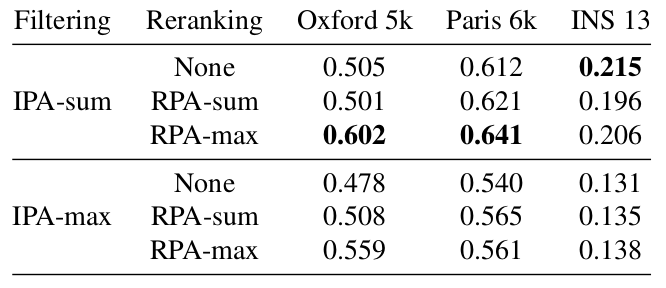
池化:求和池化 & 最大池化
求和池化特征,先用 L2 归一化,whitening 后再 L2 归一化一次;
而最大池化特征只进行一次 L2 归一化;(该操作是在池化之前,还是针对池化的结果)
详情参见1 2
微调:针对检索的目标微调 Faster-RCNN
第一种方案,只调整全连接层;
第二种方案,除前两层卷积层外都所有层都微调;
只调整全连接层在检索物体较难的时候效果不好 (什么是难);
四、实验
1. 数据集
在 Oxford 和 Pairs 数据集里,输出 12 种类别可能(11种建筑+背景);
在 INS 13 中有30种不同的检索实例,输出 31 种类别可能;
2. 实验结果
池化实验结果:求和池化 & 最大池化的对比
CA-SR 和 CS-SR 的实验结果:
五、总结
这篇文章使用现成的 Faster-RCNN 框架,做完物体检测之后再做检索,使用余弦相似度计算相似性; 除了余弦相似度,可以尝试其他计算相似度算法;
Comments